
足和踝关节的结构和功能
原始的编辑器-Vinit Kothekar,旺达·范尼克尔克,金正日杰克逊,管理,埃文·托马斯。,露辛达汉普顿,切尔西Mclene,坎迪斯高,蕾切尔劳,Simisola Ajeyalemi,要不是丘格,WikiSysop,Rucha Gadgil,杰斯贝尔,Khloud Shreif,Ewa Jaraczewska和导管年轻
解剖学[|]

足部和脚踝组成了一个复杂的系统,由28个关节组成[1]
| [2] | [3] |
结构[|]


踝关节或胫距关节构成小腿和脚的连接处。踝关节的骨性组成部分包括远端[4]
Talocrural (TC) Joint[|]
的距下关节(ST[|]
它也被称为距骨跟关节,形成于距骨和跟骨之间。 也被称为横跗骨关节或肖邦关节。从上面看,它是一个s形接头。它由两个关节组成——距舟关节和跟骰关节。 也被称为Lisfranc关节。这个综合体将中足和前足分开。 远端跗骨排包括三个楔形骨和长方体与每个跖骨的基部铰接形成TMT复合体。它是一个s形接头,分为3个不同的柱[1]: MTP关节形成于跖骨头和相应的近端指骨基部之间。脚趾的指间关节在脚趾的指骨之间形成。每个脚趾都有近端和远端IP关节,除了大脚趾只有一个IP关节。
跗骨中关节[|]

跗跖骨关节复合体[|]
跖趾关节(MTP)和指间关节(IP)[|]

| 联合 | 接头类型 | 运动平面 | 运动 |
|---|---|---|---|
| TC联合 | 铰链 | 矢状面 | 背屈和跖屈 |
| 圣联合 | 髁状的 | 主要是横向 一些矢状 |
反转与外延 背屈和跖屈 |
| 太联合 | TN接头-球和插座 CC关节-改装鞍座 |
主要是横向的 一些矢状 |
反转与外延 屈伸 |
| TMT联合 | 平面 | ||
| MTP联合 | 髁状的 | 矢状面 一些横向 |
屈伸 外展和内收 |
| IP联合 | 铰链 | 矢状面 | 屈伸 |
运动学[|]
Talocrural联合[|]

内侧踝的尖端位于外侧踝的前方和上方,这使得其轴向矢状面和额平面倾斜。旋转轴约为13°-18°从正面横向和8°-10°的角度从横切面。[1][6]为了完成跖屈和背屈的完整运动,需要在其他平面(如水平平面和正面平面)运动。[7]文献报道背屈的正常可用范围在0°-16.5°之间[8]和0°-25°,[9]这随着负重的变化而变化。据报道,跖屈的正常范围约为0°- 50°。

距下关节
![STJaxis.jpg”src=]() [|]
[|]

距下关节轴位于矢状面上方约42°,横切面内侧约16°至23°。[10][11]文献显示距下运动范围从5°到65°。[11]旋前平均ROM为5°,旋后平均ROM为20°。反演和反演ROM分别为30°和18°。[12]总的反转-反转运动约为2:1,反转-反转运动比例约为3:2。[7]
Midtarsal联合[|]
由于其解剖结构,跗骨中关节在两个轴上旋转,使其运动复杂。纵轴(下图“A”)位于水平面上方约15°,纵向平面内侧约10°。斜轴(下图“B”)位于水平面上方约52°,距中线57°。纵轴接近距下关节轴,斜轴类似距踝关节轴。

MT接头锁紧[|]
脚的一个重要功能是在站立阶段推进重量[13]。这个功能是通过MT关节锁定和解锁实现的。在脚跟着地时,足部需要灵活,以便适应地面,MT关节解锁提供这种灵活性。在步态周期的后期,脚需要作为一个刚性杠杆来推动身体的重量向前,这是通过MT关节锁定实现的。在脚内旋/外翻时,TN和CC关节的轴线彼此平行,使它们更容易独立移动和解锁MT关节。轴在旋后/反转期间相互交叉并锁定MT关节,使其难以移动。布莱克伍德等[14]结论:当跟骨外翻时,前足运动增加。这与MT关节锁定机构一致。
Lisfranc关节复合体[|]
每个TMT关节矢状面运动的程度如下所示[7]
| TMT联合 | 运动度 |
| 1日 | 1.6o |
| 2日 | 0.6o |
| 3日 | 3.5o |
| 4日 | 9.6o |
| 5日 | 10.2o |
MTP和IP连接[|]
MTP关节是双轴的,在矢状面和横切面上活动。MTP关节矢状面运动较大,横向运动很小。在MTP关节,过伸约为90°,屈曲约为30°至50°。IP关节是限制在一个方向上运动的铰链关节。
Arthrokinematics[|]
[16]在开放动力学链反转过程中,跟骨滚动进入反转,并向外侧滑动。在外翻过程中,跟骨向外翻并向中间滑动。
| 联合 | Closed-Packed位置 | Open-Packed位置 | 荚膜模式 | 凹面 | 凸面 | 凹凸的规则 横摇和滑行 |
|---|---|---|---|---|---|---|
| Talocrural联合 | 完整的背屈 | 10o跖屈和旋前和旋后中间 | 跖屈受限,尽管临床上是背屈。 限制更为常见。 |
近端-由胫骨、胫腓骨韧带和腓骨组成的榫槽 | 距骨穹窿远端滑车面 | 相反的方向 |
| 距下关节 | 完整的反转 | 倒置/ plantarflexion | 倒置在慢性关节炎中的局限性。外倾在创伤中的局限性。 | 距骨近前、中、后关节面 | 远端跟骨距前、中、后关节面 | 相反的方向 |
| Talonavicular联合 | 完整的旋后 | 极端ROM中间 | 背屈、跖屈、内收和内旋受限。 | 距骨近端:距骨头 | 距骨舟骨远端凹 | 同一方向 |
| Calcaneocuboid联合 | 完整的旋后 | 极端ROM中间 | 背屈、跖屈、内收和内旋受限。 | 远端长方体在屈伸时呈凹形。 内收外展时跟骨凹。 |
屈伸时,近端跟骨是凸的。 长方体内收外展时呈凸形。 |
屈伸=同一方向 |
| Lisfranc联合 | 完整的旋后 | 在旋后和旋前中间 | ||||
| 第一个MTP接头 | 过伸 | 轻微的(10o)扩展 | 在伸展时失去运动能力比屈曲时更严重。 | 远端-指骨的基部 | 近端-跖骨头 | 同一方向 |
| 第二至第五MTP关节 | 最大弯曲 | 轻微的(10o)扩展 | 失去屈曲。 | 远端-指骨的基部 | 近端:跖骨头 | 同一方向 |
| 关节 | 完整的扩展 | 轻微的弯曲 | 全方位的限制,更多的扩展。 | 远端方阵 | 近节指骨 | 同一方向 |
步态与足部[|]

[4]。
对运动链/步态的影响[|]
正如上文所讨论的MT关节锁定,足部从旋前到旋后的过渡是一个重要的功能,有助于适应不平坦的地形,并在推离过程中充当刚性杠杆。
- 在内旋期间,MT关节解锁,提供足部的灵活性并协助保持平衡。
- 在旋后,MT关节锁定,提供足部的刚性和最大限度的稳定性。
如果足部保持内旋,会导致足中部活动过度,对稳定足部和保持直立姿势的神经肌肉结构提出更大的要求。然而,如果足部保持旋后,中足的活动能力就会降低,这将损害足部适应地形的能力,并增加对周围结构的需求,以保持姿势的稳定性和平衡。Cote等人。[17]结论:在静态和动态条件下,足部位置对体位稳定性都有影响。连锁反应发生在脚的位置之后。
在闭合链式运动中,过度内翻的脚会发生以下动力学链式反应:

- 跟骨外翻
- 距骨内收和跖屈
- 距骨内侧旋转
- 胫骨和腓骨内侧旋转
- 膝外翻
- 股骨内侧旋转
- 骨盆前倾
在闭式链式运动中,过旋足发生以下动力学链式反应:
- 跟骨的反演
- 距骨外展和背屈
- 距骨外侧旋转
- 胫骨和腓骨的外侧旋转
- 膝内翻
- 股骨外侧旋转
- 骨盆后倾
足弓[|]

足弓提供吸收力的功能,支撑的基础,并在步态推进过程中作为刚性杠杆。
内侧纵弓、外侧纵弓和横向弓是影响足弓的三种弓。
内侧纵弓(MLA)[|]
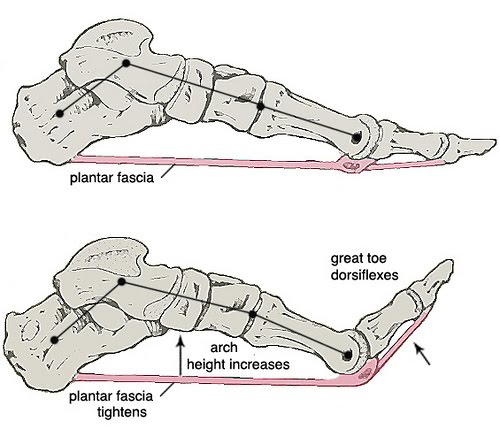
它是所有拱门中最长、最高的。MLA的骨组成包括跟骨、距骨、舟骨、三个楔形骨和前三个跖骨。拱门由两根柱子组成:前柱和后柱。前柱由前三个跖骨头组成后柱由跟骨结节组成。足底腱膜形成了连接两根柱子的支撑梁[1]。MLA的顶端是距骨的上关节面。除了足底腱膜外MLA也由横向纵拱(LLA)[|]
它是最低的足弓,由跟骨、长方体、第四和第五跖骨组成。像内侧纵弓(MLA)一样,后柱由跟骨粗隆组成。前柱由第四和第五跖骨的跖头组成。足底腱膜,长和短的足底韧带为LLA提供支持。的横拱[|]
它在非承重处是凹的,在跗骨中部和跗跖骨区从内侧到外侧延伸。足弓的骨骼组成部分包括跖骨头、长方体和3块楔形骨。拱的内侧柱和外侧柱分别由内侧和外侧纵拱构成。足弓由胫骨后肌腱和腓骨长肌腱维持,它们分别从内侧到外侧和外侧到内侧穿过足底表面。 足底腱膜的作用类似于绞车机制。一个脚的功能[|]
足部的所有功能都需要足够的机动性和稳定性。机动性是身体吸收地面反作用力所必需的。[13]距下内旋在脚跟初次接触时具有减震作用。[13][1][18][17]旋前也是必要的,以使腿的旋转和吸收这种旋转的影响。距下旋前通过旋后肌的偏心控制起到减震作用。[13]另一方面,Chopart关节变得解锁,这样前脚就可以保持松散和灵活。[1]在中间,脚需要机动性来适应不同的地面。[13][1][18][17] 足部的稳定性是为身体提供稳定的基础所必需的。脚需要承受身体重量的能力,并作为一个稳定的杠杆来推动身体前进。[13][1][18][17]这个功能需要对距下关节的旋前控制。[1][18][17] 正常的足部功能为足部提供了在适当的时间从移动适配器转换为刚性杠杆的能力。足部需要足够的机动性来移动到步态周期的所有位置,同时保持机动性和稳定性。[10][13]生理活动是必不可少的;如果活动性太大,脚就没有能力保持稳定。当满足这个条件时,关节可以支持站在稳定的最大程度的封闭位置。[13][1]当两种功能的正常过渡不正常时,在足部、腿部以及下背部都可以观察到许多过载损伤。[1][18][17]因此,三个阶段的地接触必须落在正常的时间间隔内,否则会使用一些补偿机制(例如:背屈减轻时的膝反屈),从而引起过度使用综合征。[1][19](例如:[13]肌肉像弹簧一样伸展,势能被储存起来。[13]在中步结束时,肌肉从偏心功转为同心功,能量被释放。胫骨后肌引起股骨头外展和背屈,使后肢外翻。[13]与此同时,在中步末端的腓骨长肌会用第一个脚趾的足底屈曲来拉住前脚。[13]这就是前脚掌如何变得稳定。[13] 当前脚在推进阶段运动时[13] 当身体功能的正常步态周期出现一些异常时,可以使用一些功能性矫形器。[1][18][17]这种矫形器具有纠正足部生物力学功能的能力。[1][18][17]相比之下,鞋垫只支撑足弓。下肢活动减少或受限可由关节受限引起。[1][18][17]在这些情况下,可以应用一些经典的动员或根据手动治疗的动员。[1][18][17]当原因是肌肉缩短时,可以规定一些拉伸。此外,还建议穿好跑鞋。[20]足部卷扬机机构[|]
参考文献[|]


{kind=link}